Ball Surface

We were attempting to build quadric surface by spheres, both in digital and physical. The challenges are, digitally, we have to make every balls tangent to each other and touching to their neighbors by one point; physically, we need to drill the holes on the sphere very accurately by robots and assemble them together by dowels. .
![]()
Designer: Gonglue Jiang, Corey Wowk, Arseni Zaitsev
Date: 9/2010-12/2010
Place: Harvard University GSD
Course: CAD/CAM
![]()
1. Initial thoughts
Our main focus is on the fabrication and assembly techniques of the built form by means of a fully automated assembly process focusing on the 6-axis robot. By integrating the robot into the assembly process, the technique used to connect adjacent members requires a structural performance so that adjoining spherical members are able to become interlocked through a spring-loaded connection. This connection is presumed to be populated throughout the three-dimensional matrix pattern generating the proposed geometry.


Locking system video:
2.Performance
Additionally, the process of building the proposed geometry will offer varying degrees of performance based on the configuration of the piece – small screened partition, coffee table, bench – By re-orienting the piece to achieve these three desired conditions, the supporting load of a human, planar configuration of a table, and visual porosity of a screen will be a necessary performance criteria in order to successfully achieve these three configurations
The performance of the project explores a few different aspects:
1. Connection – this assembly of pieces will be handled by a spring-loaded rod that will engage each piece when it its assembled.
2. Geometry – With the given form of the design, we are anticipating that the performance of the assembly can be utilized in multiple ways depending on the orientation of the assembly. Bench – Table – Screen partition. Because of the nature of the automation process we are utilizing, having the constraints satisfy the above three configurations gives us a top down approach. This onset of the overall form of the design, requires that the connect system and automation process be applied to the design, rather than starting from a modulated form and generating a system utilizing an initial modular. – A reversed engineering process. While starting with a set module, and instantiating it to generate a design would be ideal, our main focus for the project is to understand how to integrate a fully automated process with the 6 axis robot, and reducing the initial amount of variability with the design will allow us to focus on the robot automation process.


3. Digital model
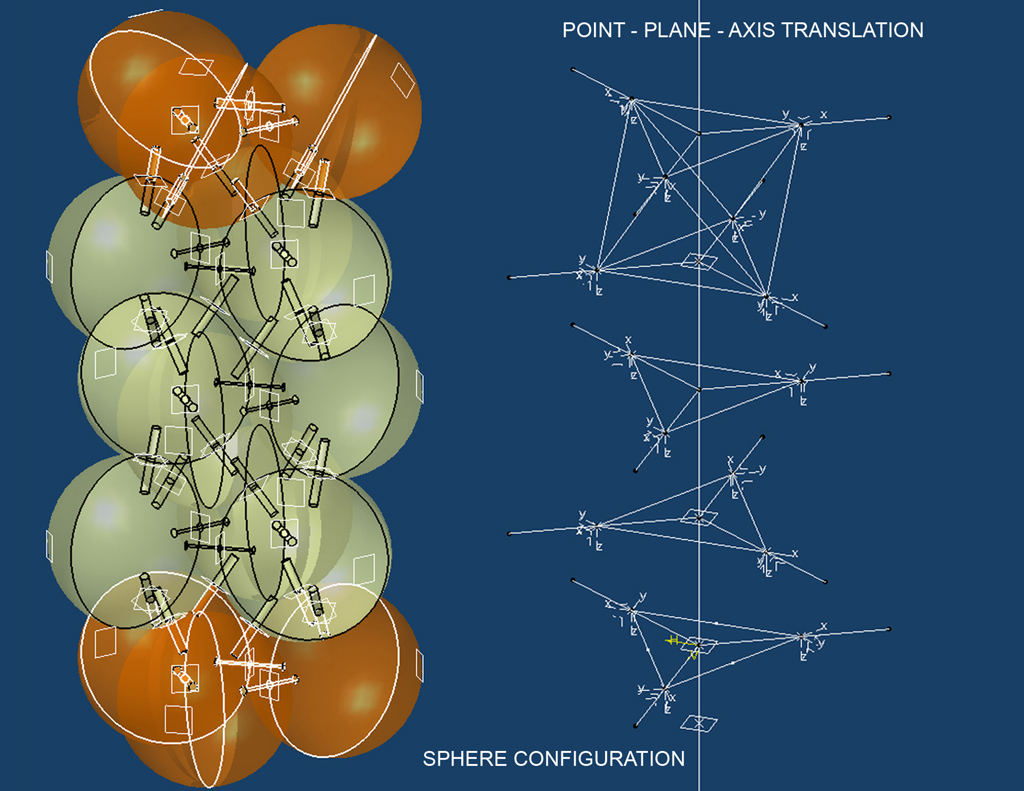
By generating a point cloud from the desired geometry we will be able to even distribute the points and generate a logic that will satisfy the constraints of what will be necessary for the three orientations described above. Additionally, the final fabricated model will be generated through a parameterized manner via a scripting method we are exploring in grasshopper. By generating a script from a rhino model to rapid code, the design will be able to go through multiple iterations without the need to utilize the teach pendant on the robot for generating each necessary point for the construction and assembly process

4. Scripting for fabrication
Due to the nature of uniform non directional objects (sphere’s in this instance), our system is able to connect these objects in any orientation – practically impossible to calculate by hand. This system allows for the design to be approached from two methods: top down or bottom up. A) Bottom Up Design – a series of modules, such as polyhedrons, connected together to form an abstract design. B) Top Down Design – We determine a surface onto which we distribute our module to the best of it’s ability via patterns.


Locating system by Grasshopper
5. Fabricating process
Simulation in RobotStudio
Robot accuracy testing

6. Prototypes




7. Final design
Final drilling process
We are developing a double curved single layered surface that will stand on it’s own. This piece will have a triad function of a coffee table, bench, and a small screen partition




